|
仧儔僕僐儞愽悈娡丄偦偺晜捑僔僗僥儉偵偮偄偰仧 亂戞俀夞亃 |
|
|
丂慜夞偼丄晜椡偲廳検偵偮偄偰愢柧偟傑偟偨偑丄崱夞偐傜幚嵺偺儔僕僐儞愽悈娡偵巊傢傟偰偄傞晜捑偺儊僇僯僘儉偵偮偄偰愢柧偟偰偄偒傑偡丅 丂RC愽悈娡偺晜捑僔僗僥儉偺僞僀僾偼丄戝偒偔暘偗偰壓偺5偮偵暘椶偡傞偙偲偑偱偒傑偡丅
仠僟僀僫儈僇儖僟僀僽 丂堦斣娙扨側愽悈娡偺晜捑曽幃偱偡丅 丂慏懱撪偵僶儔僗僩僞儞僋偼柍偔丄悇恑椡傪愽懬偵傛偭偰庴偗巭傔壓岦偒偺僠僇儔亖愽峲椡傪敪惗偝偣丄慏懱傪孹偗悈拞傊偲愽偭偰偄偒傑偡丅偦偺偨傔丄悇恑椡(儌乕僞乕)傪巭傔傞偲晜偄偰偒傑偡丅偙偺峔憿偺偨傔悈拞偱偺掆巭(儂僶儕儞僌乯傗悅捈曽岦傊偺晜捑偼晄壜擻偱偡偑丄僶儔僗僩僞儞僋傪帩偨側偄僇儞僞儞側峔憿偱偁傞偨傔惢嶌偼梕堈偱偡丅傑偨娡傪尒幐偭偰傕悇恑椡(儌乕僞乕)傪巭傔傟偽丄偟偽傜偔偡傞偲娡偑晜偄偰偔傞偺偱埨怱偱偡丅  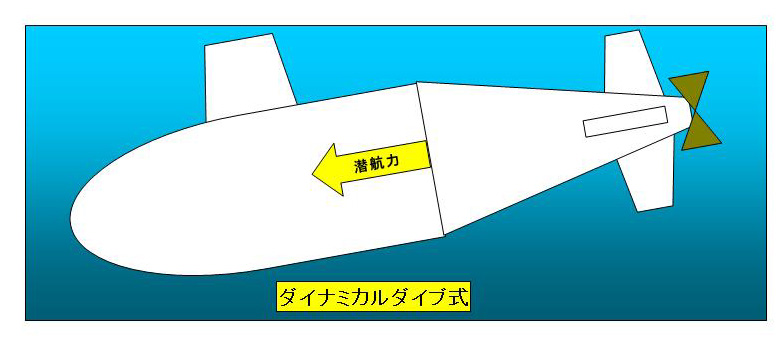 丂媔悈慄忋偺晜椡傪彫偝偔梷偊偰偍偗偽彮側偄悇恑椡偱愽傞偙偲偑偱偒傑偡偑丄媔悈慄偑掅偄偲晜椡偑戝偒偄偨傔側偐側偐愽傞偙偲偑偱偒傑偣傫丅U-BOAT偺條側壜愽娡偺応崌丄媔悈慄偑掅偔媔悈慄傛傝忋偺晜椡偑戝偒偔側傝丄愽傜偣傞偨傔偺戝偒側悇恑椡偑昁梫偲側偭偰偟傑偄傑偡丅偦偺偨傔丄僙僢僥傿儞僌偲偟偰偼娡嫶偁偨傝傑偱捑傓掱搙偺晜椡偵偡傞昁梫偑偁傝傑偡丅 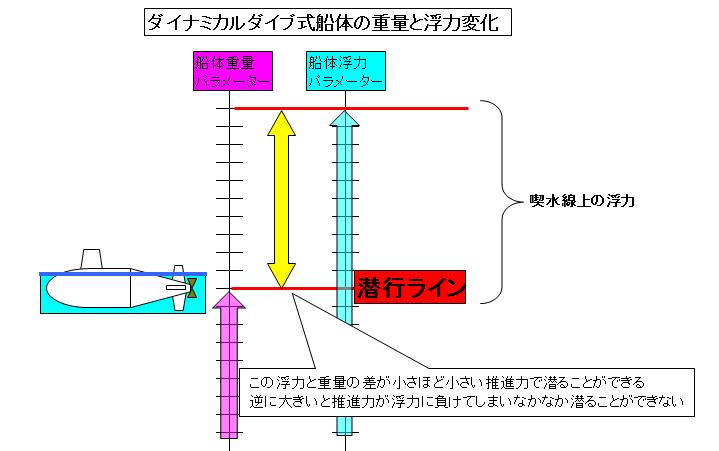 丂晜椡挷惍偼斾妑揑娙扨偱丄憱傜偣側偑傜僙僢僥傿儞僌傪偲傟偽埨掕偟偨憱峴偑妝偟傔傑偡丅 仛挿強
仛寚揰
丂師夞偼丄僶儔僗僩僔僗僥儉偺拞偱傕戙昞揑側亀僈僗丒僶儔僗僩僟僀僽亁偵偮偄偰愢柧偟傑偡丅 忋傊 TopPage [2008/12/17:幏昅:yoshi / 曇廤:塤嶳]
|
|
|
|
|